Angles are a fundemental concept in mathematics that appear in engineering, science, and everyday life. It is important to define them and understand their properties. By doing so, we will have a powerful tool to solve problems and understand the world around us.
Before we can define an angle, we must first define a ray. A ray is a directed line segment. It consists of one point on the line referred to as the endpoint and all points extending in one direction from that point. Finally, We can reference a ray by its endpoint and any other point on the ray. For example, we can refer to the ray with endpoint A and passing through point B as AB.
Fig. 1 - Ray
note
The rays AB and BA are different because they have two different endpoints and thus point in different directions. The first letter in the notation of a ray is always the endpoint.
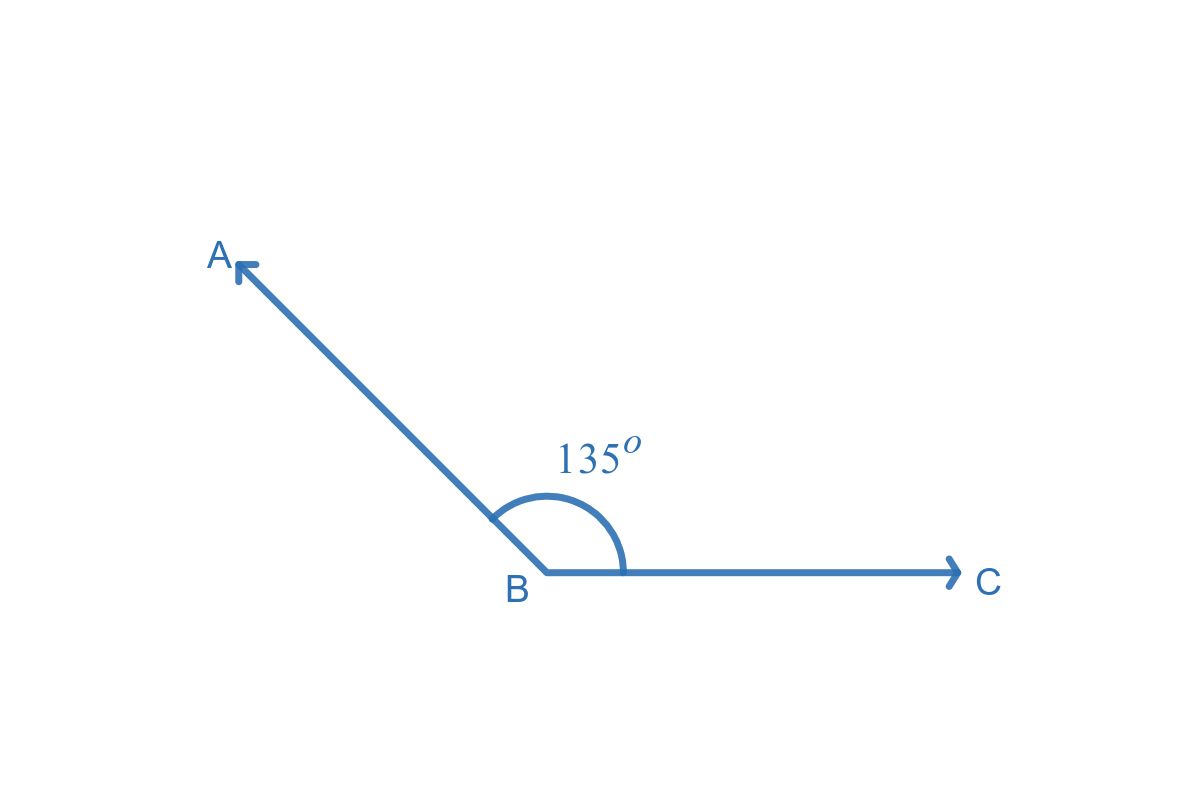
Now that we have defined a ray, we can define an angle. An angle is the union of two rays that share a common endpoint which is called the vertex of the angle. Angles are named using a point on each ray and the vertex. For example, the angle formed by rays AB and AC is denoted as ∠BAC where the vertex is A.
Fig. 2 - Angle
When creating an angle, we typically start with two rays lying on top of each other. We leave one ray fixed and this is called the initial side of the angle. We then rotate the other ray which is called the terminal side in order to create the angle.
The amount we rotate the terminal side from the initial side is called the measure of an angle. There are various units to measure angles and one of the most common units is degrees. One degree is defined as 3601 of a full circular rotation. This means a complete circular rotation contains 360 degrees. Finally, to denote an angle in degrees, we use the symbol °. For example, an angle of 45° means we have rotated the terminal side 45 degrees from the initial side.
note
Greek letters are often used to denote angles. The most common letters used are θ (theta), ϕ (phi), α (alpha), β (beta), and γ (gamma).
To formalize drawing angles, we can use the x-y coordinate plane. We can draw angles anywhere on the plane but to be able to properly compare between angles, we need to define a standard position. An angle is in standard position if its vertex is located at the origin, and its initial side extends along the positive x-axis.
If the angle is measured in the counterclockwise direction from the initial side to the terminal side, then the angle is positive. On the other hand, if the angle is measured in the clockwise direction from the initial side to the terminal side, then the angle is negative.
Given an angle measure in degrees, we can draw the angle in standard position by...
Expressing the angle measure as a fraction of 360°.
Reducing the fraction to simplest form.
Drawing an angle that contains the same fraction of the circle, beginning on the positive x-axis and rotating counterclockwise if the angle is positive or clockwise if the angle is negative.
Example
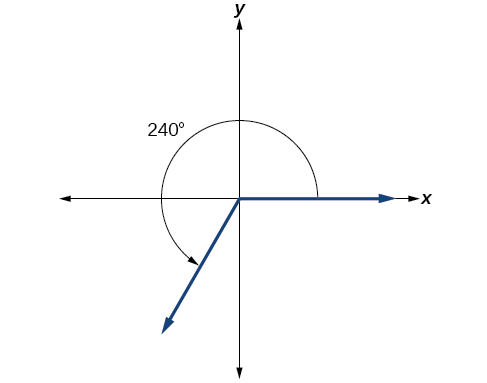
Show an angle of 240° in standard position.
Let's begin by expressing the angle as a fraction of 360°. This gives us 360240 which we can simplify to 32. Now, we draw an angle that contains 32 of the circle starting from the positive x-axis. Due to the fact that the angle is positive, we rotate the terminal side counterclockwise. This gives us the sketch...
Fig. 3 - Angle in standard position
note
Due to the fact that we define angles in standard position, there are a special type of angles that exist called the quadrantal angles. These angles are formed when the terminal side of the angle lies on one of the axes. The quadrantal angles are 0°, 90°, 180°, 270°, and 360°.
Dividing a circle into 360 is arbitrary choice that is used for degrees. It is convenient as it is divisible by many numbers but it is not the only way to measure angles.
We can also measure angles less arbitarily by using radians. Before we can define radians, we must first define an arc which may be a portion of a full circle, a full circle, or more than a full circle, represented by more than one full rotation. An arc length is the length of an arc and the arc length of a full circle is called the circumference.
The circumference of a circle is C=2πr where r is the radius of the circle. If we divide both sides by r, we get the ratio of the circumference to the radius which is 2π. This means that regardless of the size of the circle, the ratio of the circumference to the radius is always 2π. The unit radians uses the 2π as a reference point to measure angles.
As stated before, arc length is the length of an arc. Just as the full circumference of a circle always has a constant ratio to the radius, the arc length produced by any given angle also has a constant relation to the radius, regardless of the length of the radius. This ratio is called the radian measure and it allows us to define arc length s as s=rθ or θ=rs where θ is the angle in radians and r is the radius.
If we let the arc length s be equal to r, then the angle θ is equal to 1 radian. This means that an angle of 1 radian is the angle that produces an arc length equal to the radius of the circle. With this property, we can define radians as the angle that produces an arc length equal to the radius of the circle.
note
A full circle is 2π radians or 360°. This means a half circle is π radians or 180° and a quarter circle is 2π radians or 90°. Finally, a single radian is equal to π180° which is approximately 57.3°.
Due to the fact that radian measure is the ratio of two lengths, it is a unitless measure as the units cancel out. For example, if the unit is in meters, then the arc length is in meters and the radius is in meters which means when we divide the two, the meters cancel out. This makes radians a powerful tool to measure angles as it is independent of the units used.
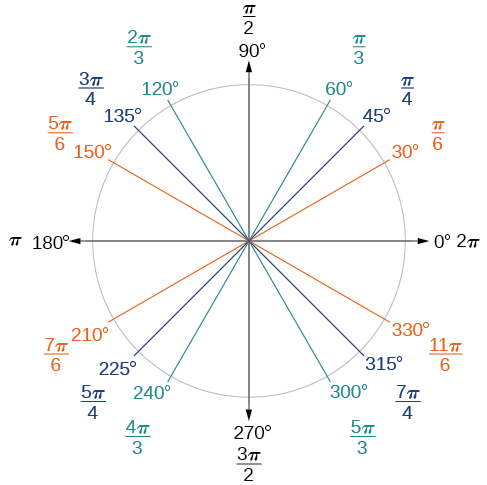
There are quite a few angles that occur frequently that is often good to memorize. There angles are...
Due to the fact degrees and radians both measure angles, we need to be able to convert between them. We are able to do this using the proportions 360θ=2πθR or 180θ=πθR where θ is the angle in degrees and θR is the angle in radians.
Example
Convert −43π radians to degrees.
We are given the angle in radians so we can substitute θR=−43π into the proportion and solve for θ...
Working with angles positive or negative outside the range of 0° to 360° or 0 to 2π can be cumbersome. It would be easier if we were to replace out-of-range angles with a corresponding angle within the range of a single revolution.
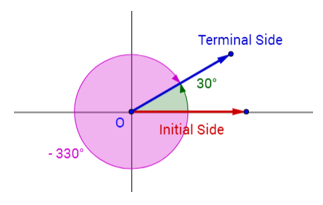
We are essentially finding the angle that is coterminal with the given angle. Coterminal angles are two angles in standard position that have the same terminal side. For example, the angles 30° and 390° are coterminal because when we draw them in standard position, they have the same terminal side.
Fig. 5 - Coterminal Angles
note
Any angle has infinetely many coterminal angles because each time we add or subtract a full revolution of 360° or 2π radians, we get a new coterminal angle.
Given an angle θ, we can find a coterminal angle between 0° and 360° using the following steps...
Verify if θ is not between 0° and 360°. If it is, then we are done.
Subtract 360° from θ if θ is greater than 360°.
Add 360° to θ if θ is less than 0°.
Repeat steps 2 and 3 until θ is between 0° and 360°.
The final angle is the coterminal angle.
We can use the same steps to find a coterminal angle between 0 and 2π radians. We just need to replace 0° with 0 and 360° with 2π.
Example
Find an angle of measure θ that is coterminal with an angle of measure −617π.
The angle −617π is not between 0 and 2π so we need to find a coterminal angle. We also can note that −617π is less than 0 so we need to add 2π to the angle until it is between 0 and 2π...
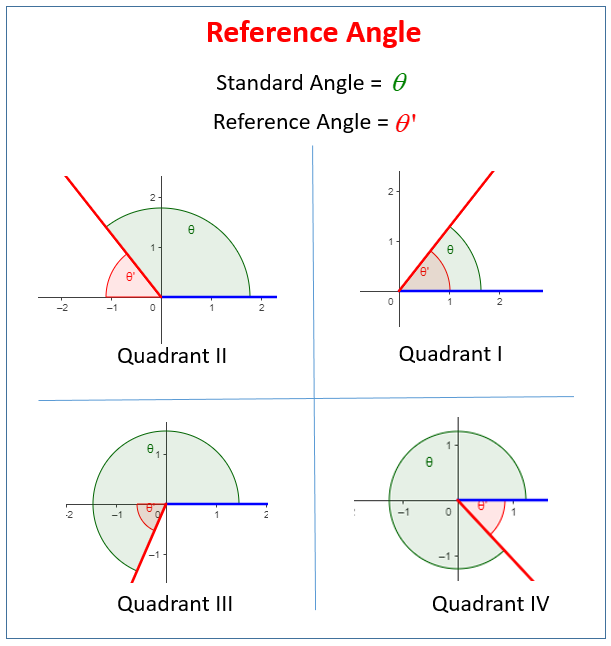
An angle's reference angle is the measure of the smallest possible acute angle t′ that can be formed by the terminal side of the angle t and the horizontal axis. This means that the reference angle always lies in the first quadrant and can be used as models for angles in other quadrants.
We can use the following formulas to find the reference angle of an angle t...
In addition to arc length, we can also use angles to find the area of a sector of a circle. A sector is a region of a circle bounded by two radii and the intercepted arc. Recall that to find the area of a circle, we use the formula A=πr2 where r is the radius of the circle. A sector is a part of a circle so if the two radii form an angle θ, then 2πθ is the ratio of the angle measure to the measure of a full rotation. The area of a sector is the fraction 2πθ multiplied by the area of the circle where r is the radius of the circle and θ is the angle in radians. The formula of the area of a sector is Area of sector=(2πθ)πr2=2πθπr2=21θr2.
Fig. 7 - Sector of a Circle
Example
Find the area of a sector of a circle with a radius of 5 meters and an angle of 60°.
To be able to use the formula, we need to convert the angle to radians...
θ=180°60°×πθ=31πθ=3π
Now we can use the formula to find the area of the sector by substituting r=5 and θ=3π...
Area of sector=21θr2Area of sector=21×3π×52Area of sector=21×3π×25Area of sector=625π square meters
Other than using angles to find the area of a sector, we can use angles to describe the speed of a moving object. The linear speed is speed along a straight path and can be determined by the distance it moves along the path in a given time interval. In mathematical terms, the linear speed is v=ts where v is the linear speed, s is displacement, and t is time.
In contrast, the angular speed is the speed resulting from an object moving along a circular path. This speed can be determined by the angle through which a point rotates in a given time interval. In mathematical terms, the angular speed is ω=tθ where ω is the angular speed, θ is the angle, and t is time.
We can combine the definition of angular speed with the arc length equation, s=rθ, to find a relationship between angular and linear speeds. We can take the angular speed equation, ω=tθ and solve for θ to get θ=ωt. We can then substitute for θ in the arc length equation to get s=rωt. Finally, we can substitute for s in the linear speed equation, v=ts, to get v=trωt=rω.
This means that the linear speed of an object moving along a circular path is equal to the radius of the circle multiplied by the angular speed of an object. The formula for the linear speed of an object moving along a circular path is v=rω where v is the linear speed, r is the radius of the circle, and ω is the angular speed.
Example
A satellite is rotating around Earth at 0.25 radian per hour at an altitude of 242 km above Earth. If the radius of Earth is 6378 kilometers, find the linear speed of the satellite in kilometers per hour.
We are given the angular speed of the satellite, ω=0.25 radian per hour. The satellite is 242 km above Earth which has a radius of 6378 km. This means the radius is 242+6378 km. So, we can use the formula v=rω to find the linear speed of the satellite...
v=rωv=(242+6378)×0.25v=6620×0.25v=1655 kilometers per hour
The linear speed of the satellite is 1655 kilometers per hour.